

- Главная
- Спецпроекты «ПортНьюс»
- Инновации в дноуглублении
- Роботизация в дноуглублении
Инновации в дноуглублении
Роботизация в дноуглублении

Технический директор ООО «Нониус инжиниринг» Михаил Чемоданов на организованном ИАА «ПортНьюс» конгрессе «Гидротехнические сооружения и дноуглубление» рассказал о перспективной разработке, предполагающей автоматизацию работы земснарядов, и некоторых других инновационных решениях отечественных специалистов.
- Судостроение отличается от автопрома большей инертностью. Однако рано или поздно вопрос автоматизации и создания беспилотных судов станет ключевым для отрасли. Поэтому важно начинать заниматься инновационными разработками не тогда, когда тренд станет очевидным, а заранее.
Роботизация земснарядов позволит сократить эксплуатационные затраты на содержание персонала и обеспечение жестких условий безопасности его работы. Это очевидные плюсы в пользу развития этого направления. Впрочем, есть и минусы: высокие стартовые инвестиции и вероятность программных ошибок.
Однако процесс автоматизации необратим. Чтобы сохранять конкурентоспособность в дноуглубительной индустрии компании с мировым именем, в числе которых IHC, Damen, «Фертоинг», JanDeNu, DredgeYard, внедряют различные системы автоматического управления. Ранее советские инженеры неплохо продвинулись в этом вопросе, ими были предложены достаточно приличные наработки по автоматизации судов и земснарядов: система ориентации «Автоствор», «Радиус», САУТП типа «Волга». Между тем, элементная база этих систем к настоящему времени полностью устарела, поэтому отечественным разработчикам сейчас приходится начинать все заново.
Специалисты компании «Нониус инжиниринг» разработали трехмерную систему позиционирования и мониторинга для землесосов. С ее помощью багермейстер может видеть положение земснаряда относительно карты глубин, положение грунтозаборного устройства относительно рельефа дна, проектной глубины и проектных границ. 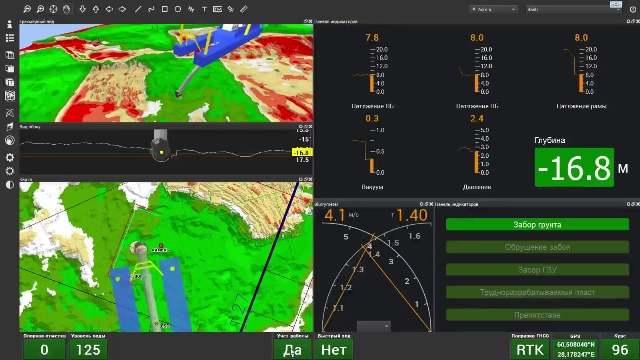 Есть и программа мониторинга производительности землесосов, с классическими индикаторами в виде двух пересекающихся стрелочных индикаторов скорости пульпы и ее плотности, но со всеми преимуществами цифровых интеллектуальных систем.
Есть и программа мониторинга производительности землесосов, с классическими индикаторами в виде двух пересекающихся стрелочных индикаторов скорости пульпы и ее плотности, но со всеми преимуществами цифровых интеллектуальных систем.
Кроме этого, уже проведены теоретические исследования по роботизации земснаряда. Специалисты компании «Нониус инжиниринг» сфокусировали внимание на автоматизации рефулерного земснаряда, наиболее часто используемого в дноуглубительных работах, в том числе и на внутренних водных путях. Для решения задачи инженеры сосредоточились на двух направлениях: контроле перемещений в горизонтальной плоскости и контроле грунтозаборного устройства.
Разработчики компании совместно с коллегами из нижегородских институтов разработали схему автоматизации с обратной связью грунтозаборного устройства. Для отладки алгоритмов создан симулятор земснаряда на базе программного обеспечения компании «Нониус инжиниринг». На этом симуляторе отрабатываются алгоритмы, позволяющие связывать данные, получаемые от датчиков с действиями исполнительных устройств. В качестве входной информации в алгоритмы используются данные о положении грунтозаборного устройства, данные о натяжении и положение лебедок, давлении, плотности и скорости пульпы, а также иная информация.  В качестве одной из отрабатываемых ситуаций можно привести пример обнаружения упора грунтозаборного устройства в препятствие при папильонировании. Система получает информацию о снижении концентрации пульпы и росте натяжения лебедки, идентифицируя такие наборы данных как маркеры ситуации. После классификации состояний машина переходит в соответствующий режим и меняет характер команд, подаваемых на исполняемые устройства, с целью обхода препятствия. После исчезновения маркеров программа дает команду вновь опустить раму грунтозаборного устройства. Конечно, это лишь один из алгоритмов автоматизации работы оборудования. Теоретический уровень проработки роботизации земснаряда достаточен, чтобы начать практическое внедрение.
В качестве одной из отрабатываемых ситуаций можно привести пример обнаружения упора грунтозаборного устройства в препятствие при папильонировании. Система получает информацию о снижении концентрации пульпы и росте натяжения лебедки, идентифицируя такие наборы данных как маркеры ситуации. После классификации состояний машина переходит в соответствующий режим и меняет характер команд, подаваемых на исполняемые устройства, с целью обхода препятствия. После исчезновения маркеров программа дает команду вновь опустить раму грунтозаборного устройства. Конечно, это лишь один из алгоритмов автоматизации работы оборудования. Теоретический уровень проработки роботизации земснаряда достаточен, чтобы начать практическое внедрение.
Нельзя ограничиваться автоматизацией лишь земснаряда. Есть ряд и прочих задач, без которых полностью систему не роботизировать. Речь идет о промерах, бункеровке, обслуживании, буксировки. На этих процессах мы пока не останавливаемся. Тем не менее, очевидно, что по мере развития технологий начнется процесс объединения беспилотного дноуглубительного флота в единую интеллектуальную экосистему.
Татьяна Вильде